Introduction
For historical reasons, there is no visible/infrared imager on board Megha-Tropiques (MT). Hence the MT mission heavily relies upon the geostationary data for its full exploitation. In particular, a cloud classification has been derived from geostationary observations to enable a better scene identification: the cloud classification is an input for the SAPHIR-MADRAS algorithm deriving relative humidity profiles. Besides, those classifications give useful complementary informations for the contextualisation of orbits and to derive quick-looks.
Cloud mask (CMa), cloud type classification (CT), cloud top pressure/height/ temperature (CTTH) products are available for the GOES-E, GOES-W, MTSAT and SEVIRI/MSG geostationnary satellite fields of view. This covers the tropical belt except the Indian ocean (figure 1) at a spatial resolution below 10kmx10km and with a repeat cycle close to one half hour (15 minutes in the SEVIRI field of view).
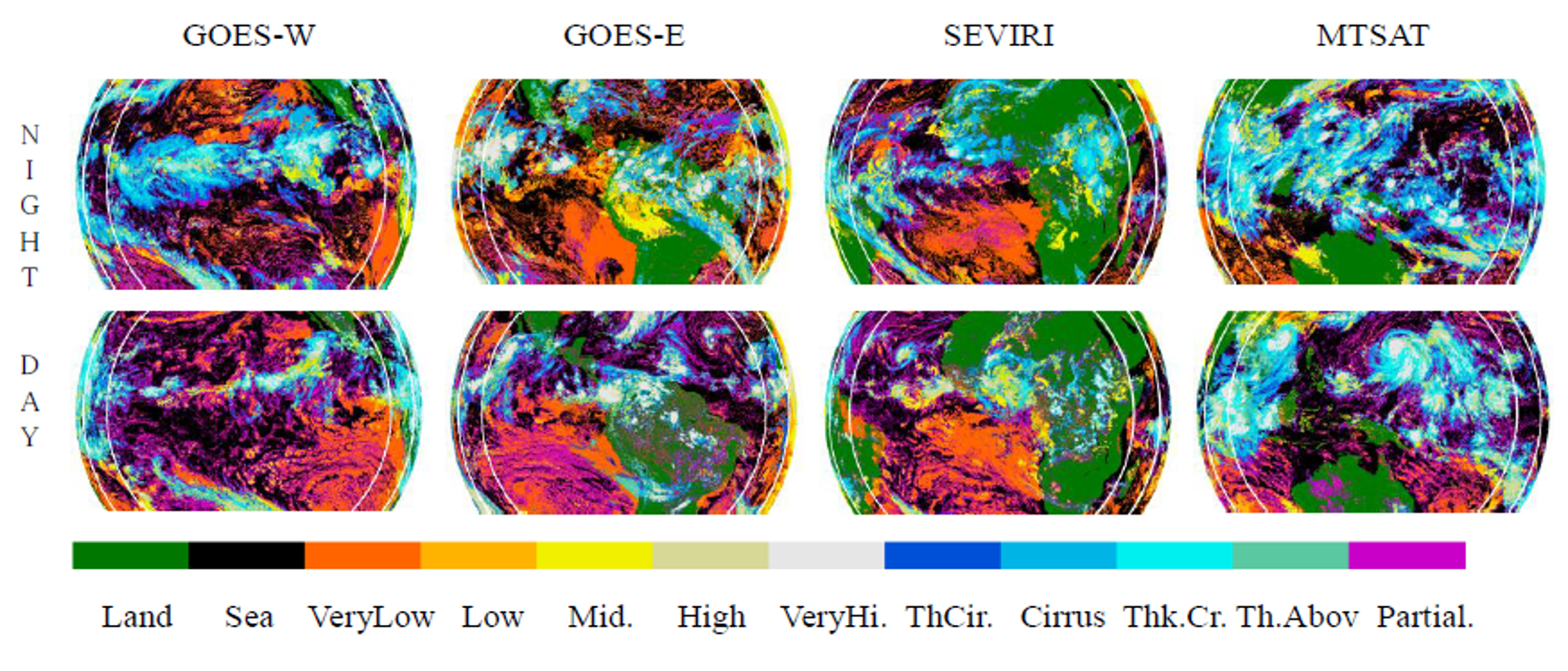
Figure 1: Example for MTSAT, GOES-W, GOES-E and SEVIRI of cloud type classifications (bottom row) for the 15 September 2009 for a GMT corresponding to a local time close to 13h30 at sub-satellite point and (top row) for the 3 June 2009 for a GMT corresponding to a local time close to 01h30 at sub-satellite point. The two white circles give respectively the 55° and 72.5° satellite viewing angle limits.
Principle
A standardized procedure based on the v2008 version of the retrieval method built by the SAFNWC for EUMETSAT (Legleau and Derrien, 2005; Derrien and Legleau, 2010) for SEVIRI has been applied to other geostationary satellites, with the technical support of the CGTD/ICARE thematic center. Those derived products are called the GEOCLD products. The SAFNWC algorithm has been chosen because it can be easily adapted to the spectral characteristics of any radiometer and to the surface properties of the field of view of geostationary satellite other than SEVIRI. Developed for SEVIRI with ten channels, it can be applied to any other imager with a visible channel, a mid-IR channel, a IR window channel and a sounder channel (WV or CO2). However, the quality of the retrieval is expected to decrease when limiting the number of spectral bands.
The cloud detection and cloud classification, the two first steps of the SAFNWC algorithm, rely in its v2008 version on multi-spectral threshold tests applied at the pixel scale to a set of spectral and textural features (Derrien and Le Gléau, 2005). Newer versions make use also of the temporal evolution (short term, within one hour) (Derrien and Le Gléau, 2010) allowing to improve cloud detection in particular at twilight. An important feature of the algorithm is that the threshold values depend on the illumination and viewing geometry and the geographical location. They are computed using ancillary data and NWP fields using radiative transfer model (RTTOV). The ancillary data are atlas (height map and land/sea mask), climatological maps of SST and continental reflectance, NWP surface temperature, integrated atmospheric precipitable water and a coarse vertical structure of the atmosphere. Concerning the third step of the SAFNWC algorithm, the cloud top height (CTH) for opaque cloud is retrieved from the 10.8 µm brightness temperature, NWP temperature and humidity vertical profile. For low/middle clouds, tests are applied tending to place the cloud top level below an existing temperature inversion. For high thin clouds, a correction for semi-transparency is applied using two IR channels, a window channel and a sounding one (13.4 , 7.3 or 6.2 µm).
Validation
A quantitative evaluation of the quality and limits of the cloud field obtained as a function of the geostationary satellite used has been performed. For two points in the diurnal cycle (0130LST and 1330LST) the cloud products have been analysed and compared to the cloud layer structure observed with the lidar CALIOP on board the CALIPSO platform (Sèze et al., 2015). To go further into the evaluation of the cloud cover at different times of diurnal cycle, an undergoing study adds LMD cloud products obtained from AIRS and IASI sounder data ( Stubenrauch et al., 2008) in the comparison between the geostationary data and CALIOP data .
Version
The released products have been produced with different versions of the SAFNWC algorithms and by different data centers (all products are still re-distributed by ICARE):
- GEOCLD products: V2008 of the SAFNWC algorithm.
- SAFNWC products: V2013 and V2016 of the SAFNWC algorithm.
The table below presents the available products and versionning from the Megha-Tropiques launch date till present.
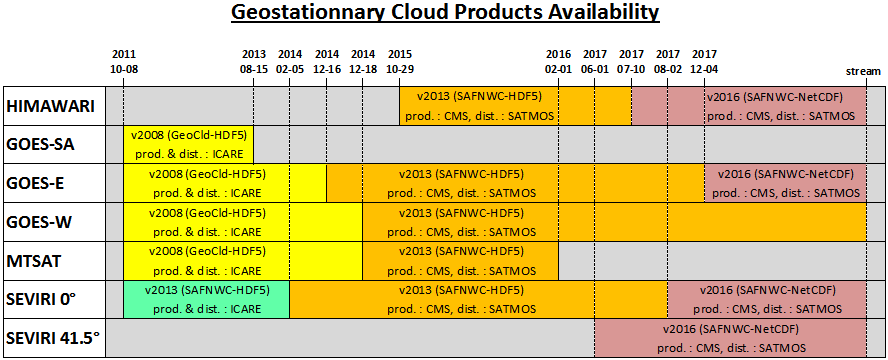
(prod: production center/ dist: distribution center)
The main differences between V2008, V2013 and V2016 SAFNWC algorithms are:
In the v2008 CMa cloud detection is performed by a multi-spectral threshold method: the image is compared with thresholds which delimit brightness temperatures/reflectance of cloud free pixels from those of pixels containing clouds, dust or snow/sea ice. From v2009 this process is complemented by an analysis of the temporal variation (on a short period of time: 15 minutes) of some spectral combination of channels (to detect rapidly moving clouds), a specific treatment combining temporal coherency analysis and region growing technique (to improve the detection of low clouds). In the v2010 a temporal analysis of the HRV channel to detect sub-pixel low clouds has been added as well the cloud phase retrieval (CT product). For CTTH, the major improvememts (implemented in the version 2009) include a better tuning (especially through a wider use of the radiance ratioing technique and a better handling of thermal inversion in case low clouds). v2013 benefits of all these improvements and some additional tuning.
Since 2013 release, the following improvements have been implemented in V2016:
- Technical improvements: interface to updated NWCLIB, new output format, technical
adaptation to process other meteorological geostationary satellites than MSG - Scientific improvements:
- GEO-CMA: use of RTTOV on line to improve some thresholds, reduction of fire/cloud confusion
- GEO-CT: none
- GEO-CTTH: none
- GEO-CMIC: new product based on cloud phase and cloud optical thickness and effective particle size respectively output and internally computed in CT from 2013 release. The main improvement since 2013 release is the availability of new outputs (cloud optical thickness, effective particle size, liquid and ice water path) and the use by the retrieval algorithm of cloud reflectance simulations based on DISORT instead RTMOM.
Contact
For information:genevieve.seze@lmd.jussieu.fr (LMD)
For complementary scientific expertise :herve.legleau@meteo.fr (SAFNWC, CMS/ Meteo-France)
For technical information: Bruno.Six@univ-lille1.fr(CGTD/ICARE)
References
Derrien, M. and H. Le Gléau, 2005, MSG/SEVIRI cloud mask and type from SAFNWC. International Journal of Remote Sensing, 26, 4707-4732.
Derrien, M., and Le Gléau, H., 2010, Improvement of cloud detection near sunrise and sunset by temporal-differencing and region-growing techniques with real-time SEVIRI, International Journal of Remote Sensing , 31, 7, pp 1765–1780 DOI: 10.1080/01431160902926632
Sèze, G., Pelon, J., Derrien, M., Le Gléau, H. and Six, B. 2015: Evaluation against CALIPSO lidar observations of the multi-geostationary cloud cover and type dataset assembled in the framework of the Megha-Tropiques mission. Q.J.R. Meteorol. Soc.. Vol. 141, Issue 688, P 774-797. doi: 10.1002/qj.2392
Documents
Documents for the V2008 GEOCLD products :
- Algorithm Theoretical Basis Document for « Cloud Products » (CMa-PGE01, CT-PGE02 & CTTH-PGE03 v1.4)
- Product User Manual for « Cloud Products » (CMa-PGE01, CT-PGE02 & CTTH-PGE03 v1.4)
- Validation Report for “Cloud Products” (CMa-PGE01, CT-PGE02 & CTTH-PGE03 v1.4)
Documents for the V2013 SAFNWC products:
- SAF NWC / MSG Output Products Format Definition
- Algorithm Theoretical Basis Document for « Cloud Products » (CMa-PGE01, CT-PGE02 & CTTH-PGE03 v2.2)
- Product User Manual for « Cloud Products » (CMa-PGE01, CT-PGE02 & CTTH-PGE03 v2.2)
- Validation Report for “Cloud Products” (CMa-PGE01, CT-PGE02 & CTTH-PGE03 v2.2)
- Scientific Report on improving « Cloud product » (CMa-PGE01, CT-PGE02 & CTTH-PGE03 v2.2)
- Product evaluation with Lidar and IR soundeurs onboard Polar Orbiting Satellites
The SAFNWC cloud product, the associated quality flags and “sub-products” are described at the following links:
On those SAFNWC pages, the link to ATBD SAFNWC algorithm documents points to ATBD document for the most recent version of the SAFNWC algorithm.